В настоящее время кажется, что роботы повсюду - в фильмах, аэропортах, на производстве продуктов питания и даже на фабриках, производящих других роботов. У роботов много разных функций и применений, и по мере того, как их производство становится проще и дешевле, они становятся все более и более распространенными в отрасли. Поскольку спрос на робототехнику растет, производители роботов должны не отставать, и основным методом производства деталей роботов является обработка с ЧПУ. Из этой статьи вы узнаете больше о стандартных частях роботов и о том, почему обработка с ЧПУ так важна для производства роботов.
Обработка с ЧПУ специально разработана для роботов
Во-первых, обработка с ЧПУ позволяет производить детали в очень короткие сроки. Почти после того, как вы подготовили 3D-модель, вы можете начать использовать станки с ЧПУ для изготовления компонентов. Это обеспечивает быструю итерацию прототипов и быструю доставку индивидуальных роботизированных деталей для профессиональных приложений.
Еще одно преимущество обработки с ЧПУ заключается в том, что с ее помощью можно точно производить детали, соответствующие спецификациям. Эта производственная точность особенно важна для робототехники, поскольку точность размеров является ключом к производству высокопроизводительных роботов. Прецизионная обработка с ЧПУ может поддерживать допуски в пределах +/- 0,0002 дюйма, и эта деталь позволяет роботу выполнять точные и повторяемые движения.
Обработка поверхности - еще одна причина использования обработки с ЧПУ для производства роботизированных деталей. Взаимодействующие части должны иметь низкое трение. Прецизионная обработка с ЧПУ позволяет производить детали с шероховатостью поверхности Ra 0,8μm или даже ниже после финишных операций, таких как полировка. Напротив, литье под давлением (перед любой отделкой) обычно дает шероховатость поверхности около 5 мкм. 3D-печать металлом сделает поверхность более шероховатой.
Наконец, тип материала, используемого роботом, является идеальным материалом для обработки с ЧПУ. Роботы должны иметь возможность перемещать и поднимать объекты устойчиво, и им нужны прочные и твердые материалы. Эти необходимые свойства лучше всего достигаются при обработке некоторых металлов и пластмасс. Кроме того, роботы часто используются для индивидуального или мелкосерийного производства, что делает обработку с ЧПУ естественным выбором для деталей роботов.
Типы деталей роботов, изготавливаемых с помощью станков с ЧПУ
Благодаря такому количеству возможных функций появилось много разных типов роботов. Обычно используются несколько основных типов роботов. Одна рука шарнирного робота имеет несколько суставов, что многие люди видели. Также существует робот SCARA (Selective Compliance Articulated Robot Arm), который может перемещать предметы между двумя параллельными плоскостями. SCARA обладает высокой вертикальной жесткостью, потому что их движение горизонтально. Шарниры робота Delta расположены внизу, что обеспечивает легкость рук и их быстрое перемещение. Наконец, портальные или декартовы роботы имеют линейные приводы, которые перемещаются на 90 градусов друг к другу. Каждый из этих роботов имеет разную структуру и разные приложения, но обычно робот состоит из пяти основных компонентов.
Обычно используются несколько типов роботов. Одна рука шарнирного робота имеет несколько суставов, что многие люди видели. Существует также робот SCARA (Selective Compliant Joint Robot Arm), который может перемещать объекты между двумя параллельными плоскостями. SCARA имеет высокую вертикальную жесткость, потому что их движение горизонтально. Шарниры дельта-робота расположены на основании, благодаря чему руки легкие и могут быстро двигаться. Наконец, портальные или декартовы роботы имеют линейные приводы, которые перемещаются на 90 градусов друг к другу. Каждый из этих роботов имеет разную структуру и разные приложения, но обычно состоит из 5 основных компонентов:
1. Роботизированная рука
Руки роботов очень разные по форме и функциям, поэтому используется много разных частей. Однако у них есть одна общая черта: они могут перемещать или манипулировать объектами - это ничем не отличается от человеческой руки! Различные части манипулятора робота даже названы в честь наших частей: плечевые, локтевые и запястные суставы вращаются и управляют движением каждой части.

2. Концевой эффектор
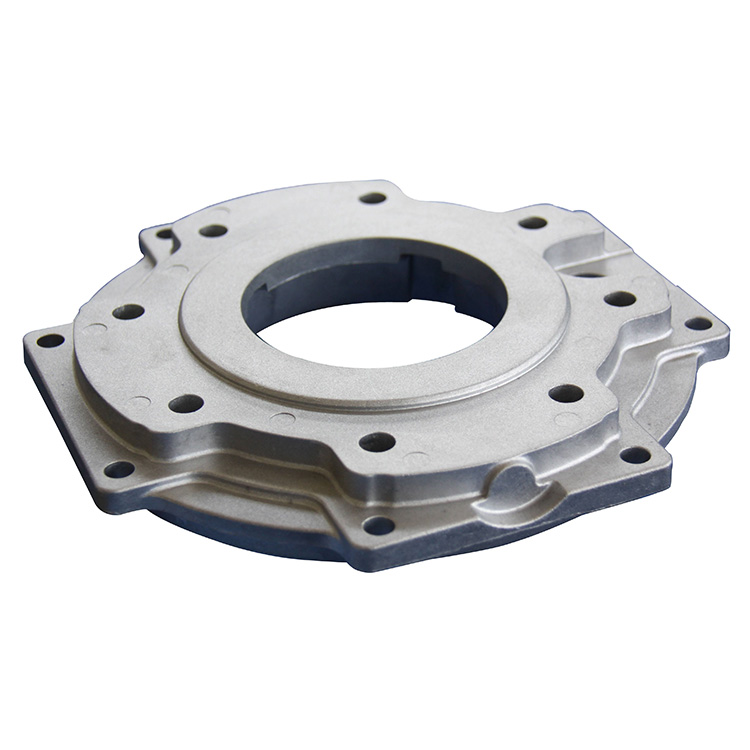
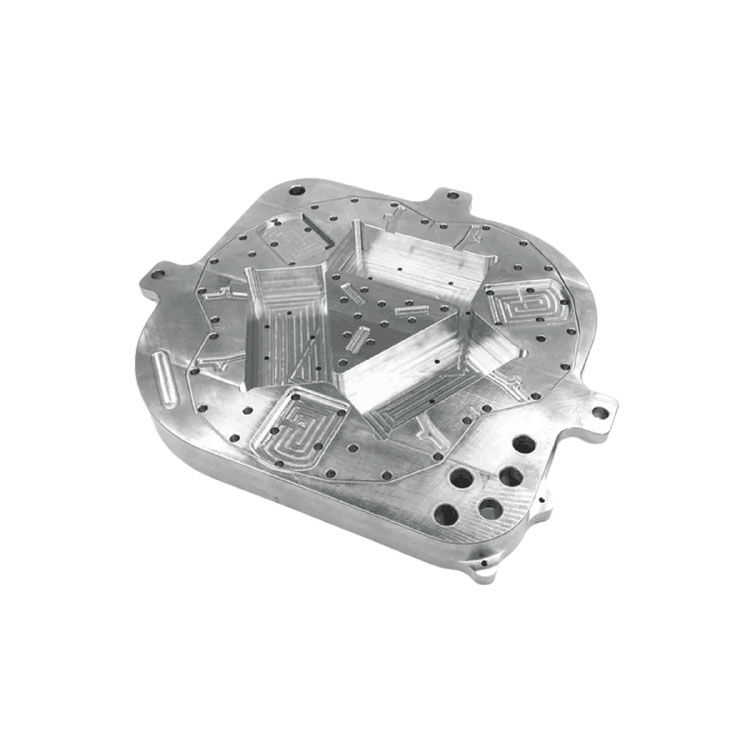
Концевой эффектор - это аксессуар, прикрепленный к концу манипулятора робота. Концевой эффектор позволяет настраивать функции робота в соответствии с различными операциями, не создавая совершенно нового робота. Это могут быть захваты, захваты, пылесосы или присоски. Эти концевые эффекторы обычно представляют собой детали из металла (обычно алюминия), обработанные на станке с ЧПУ. Один из компонентов постоянно подключен к концу манипулятора робота. Фактический захват, присоска или другой концевой эффектор согласованы с этим узлом, поэтому им можно управлять с помощью манипулятора робота. Эта установка с двумя разными компонентами упрощает замену различных концевых эффекторов, поэтому робот может быть адаптирован для различных приложений. Вы можете увидеть это на изображении ниже. Нижний диск будет прикручен к манипулятору робота, что позволит вам подключить шланг, приводящий в действие присоску, к устройству подачи воздуха робота. Верхний и нижний диски являются примерами деталей, обработанных на станках с ЧПУ.

(Концевой эффектор включает в себя множество обрабатываемых деталей с ЧПУ)
3. Мотор
Каждому роботу нужен двигатель для движения рук и суставов. Сам двигатель имеет множество движущихся частей, многие из которых могут обрабатываться с помощью ЧПУ. Вообще говоря, в двигателе используется какой-то механически обработанный корпус в качестве источника питания и механически обработанный кронштейн, который соединяет его с роботизированной рукой. Подшипники и валы также обычно обрабатываются на станках с ЧПУ. Вал можно обработать на токарном станке, чтобы уменьшить диаметр, или на фрезерном станке, чтобы добавить такие элементы, как шпонки или канавки. Наконец, фрезерование, электроэрозионное фрезерование или зубофрезерование можно использовать для передачи движения двигателя на шарниры или другие механизмы робота.
4. Контроллер
Контроллер - это в основном мозг робота, который контролирует точное движение робота. Как компьютер робота, он принимает входные данные от датчиков и изменяет программу, управляющую выходными данными. Для этого требуется печатная плата (PCB) для размещения электронных компонентов. Перед добавлением электронных компонентов печатную плату можно обработать с помощью ЧПУ для достижения необходимого размера и формы.
5. Датчик
Как упоминалось выше, датчик получает информацию об окружающей среде робота и передает ее обратно в контроллер робота. Для датчика также требуется печатная плата, которую можно обработать с помощью ЧПУ. Иногда эти датчики также устанавливаются в корпусах с ЧПУ.
6. Пользовательские приспособления и фиксированные устройства.
Хотя это и не является частью самого робота, для большинства операций робота требуются специальные приспособления и фиксированные устройства. Когда робот работает с деталью, вам может понадобиться приспособление для фиксации детали. Вы также можете использовать приспособления для точного позиционирования деталей, которые обычно необходимы роботам, чтобы поднимать или опускать детали. Поскольку это, как правило, единичные индивидуальные детали, обработка с ЧПУ очень подходит для приспособлений.
---------------------------------------КОНЕЦ---------- -------------------------------------